DD-WRT came with SoftEther VPN and it looked pretty scary because it shows no user interface and a box for you to enter a config file!
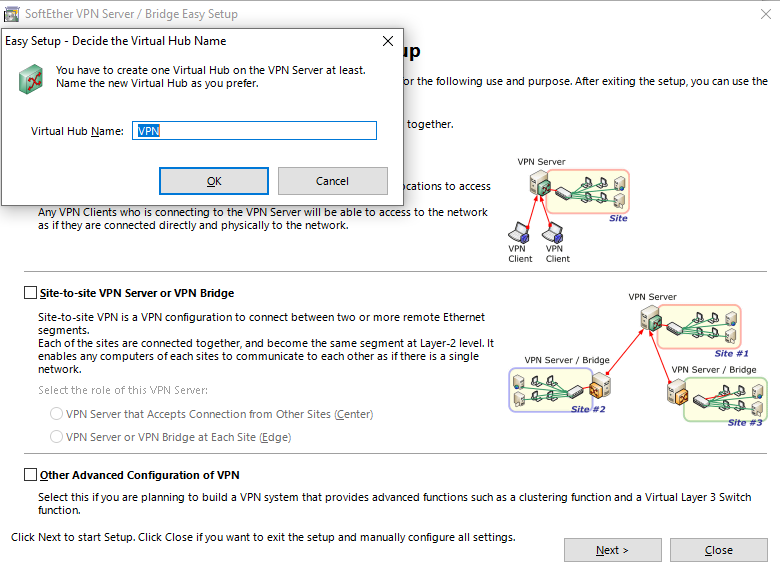
Turns out SoftEther VPN’s Remote Admin interface is basically a tool that takes all user settings, generate a config file and upload it to the server behind the scenes!
Concepts to know
vpn_server.config is the core file the defines the server.
SoftEther VPN Server Manager (The remote admin program) is basically a tool to generate the config text string from the UI and pass it to the server’s memory (not file yet until the server stops and flushes its config state out)
Default location of the config file
SoftEther by default reads and writes the vpn_server.config file which controls everything in a JFFS folder. So you are better off identifying it by doing a path search because they move around from version to version of dd-wrt:
find /jffs -name vpn_server.config
So for my case the core file path is
/jffs/var/softethervpn/vpn_server.configConfig file’s file access/update mechanism
SoftEther’s explicitly stated that their config file (vpn_server.config) handling mechanism does not flush the current state in use to the file until the server stops. So it has the following behavioral implications:
- Changes made by the admin program is reflected immediately despite no file is updated
- If you change the config file while the server is running, the changes will be lost/overwritten as the server flushes the data on RAM to disk
- If you abruptly power off the server, the changes made while the server is running (through the remote admin program) is lost as it doesn’t have a chance to flush the updated state out.
- If you read the config file while the server is running, you are not getting the changes that are currently done through the Manager (Remote Admin) program.
- In summary the config file is stale while the server is running.
- When loading the config file to the server by any means (command or GUI), the server parses the entire file and immediately scan and act on the new state defined by the config file (eager execution), not waiting for the next turn the specific state is accessed (lazy execution).
Softether on DD-WRT has no memory out of the box!
Disable this WebUI section entirely and script it yourself!
Out of the box the DD-WRT did not specify which config file to tie to (or open with by default) so the config received from the Server Manager only stays in memory and is not written anywhere! WTF!
So every time I reboot, the settings are totally lost and I have to re-enter it from scratch. Linux mentality again! People did the hardest fun work showing off how smart they are yet their software doesn’t gain the mainstream adoption because nobody ties up the loose ends so the 95% excellent work got sabotaged by the 5% loose ends that are not tied!
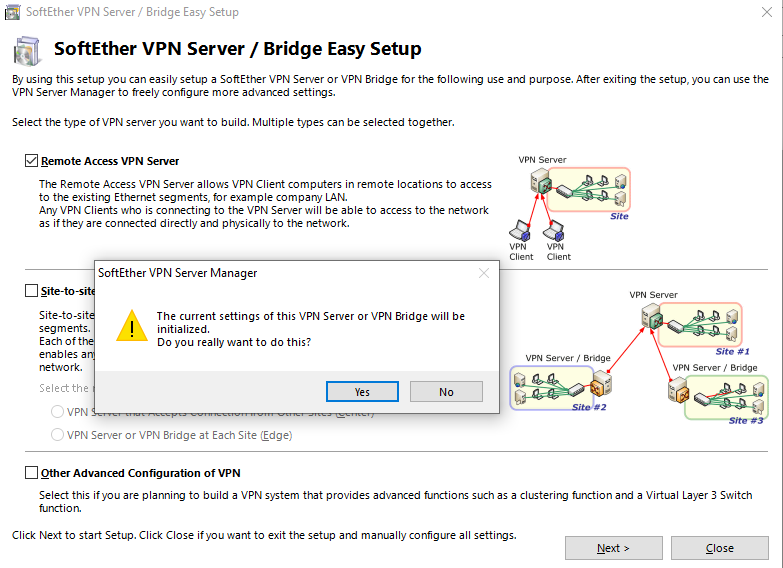
Turns out Softether, if enabled in DD-WRT‘s web UI, will always boot with a blank config which makes it useless!

The stuff in the Web UI in general loads BEFORE the startup (user custom) scripts! This means you are opening the router up for a few seconds of confused state before your startup scripts loads your custom config file to Softether on the fly!
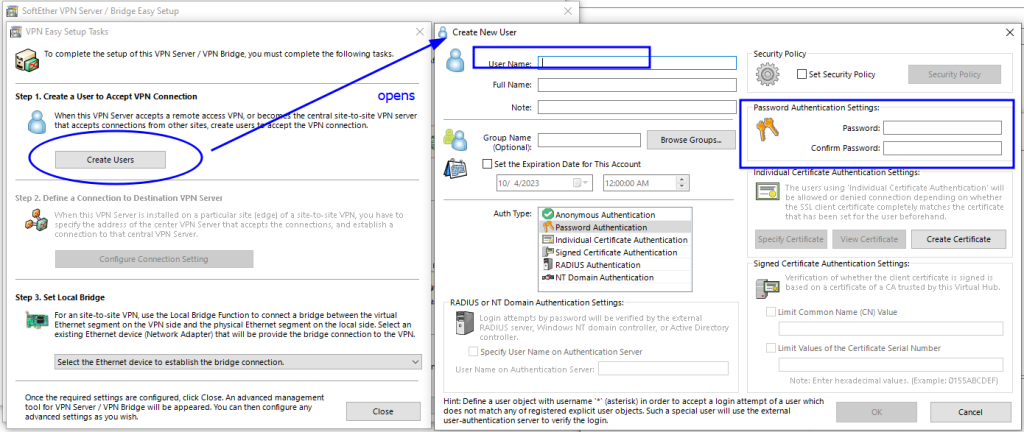
This few seconds of sloppy logistics has more sinister effects than the designer expected (I bet he thought loading a config on the fly later is good enough)! When we connect to the Softether server admin tool while it’s on a blank config, it will ask the user to create a new password then write it as a new config! If you finished initializing a blank config (creating a new password) before your startup scripts kick in with the old config file you meant to load, you just nuked your intended config file by overwriting it with a blank you just initialized with your new password!
This means the whole Web UI on Softether is a disastrous TRAP! Disable it!
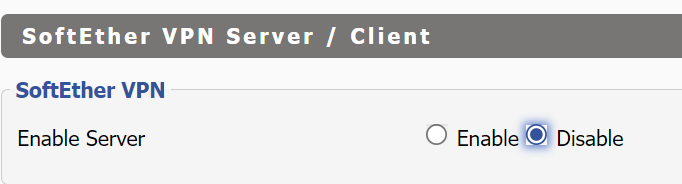
Softether is pre-installed and you must enable Softether solely from startup scripts to avoid this undesirable behavior that you might accidentally overwrite your config file with a blank!
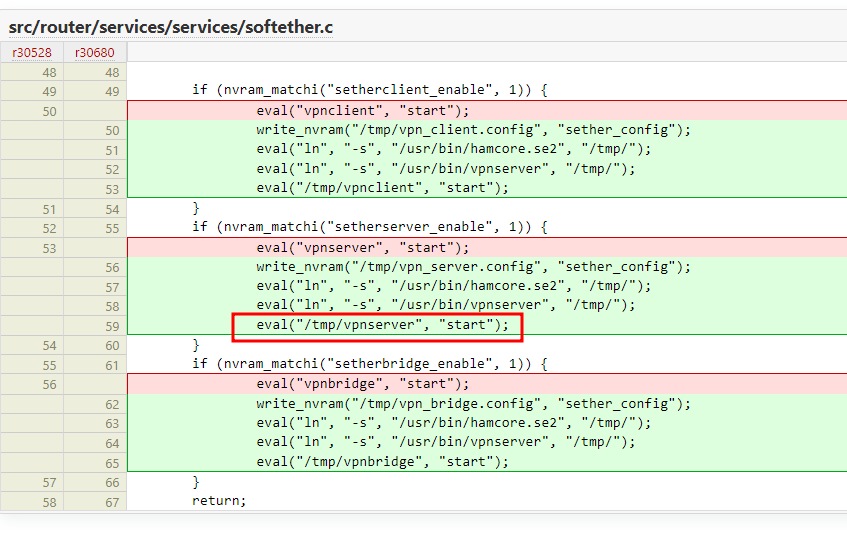
Luckily by reading the source code, I realized that the pre-installed Softether won’t be neutered if we don’t enable it in the Web UI. The Web UI primiarly calls vpnserver start to start the Softether service, which we can do it ourselves LATER in our custom startup scripts. This means we can safely just disable the Web UI’s garbage Softether section.
Script it yourself
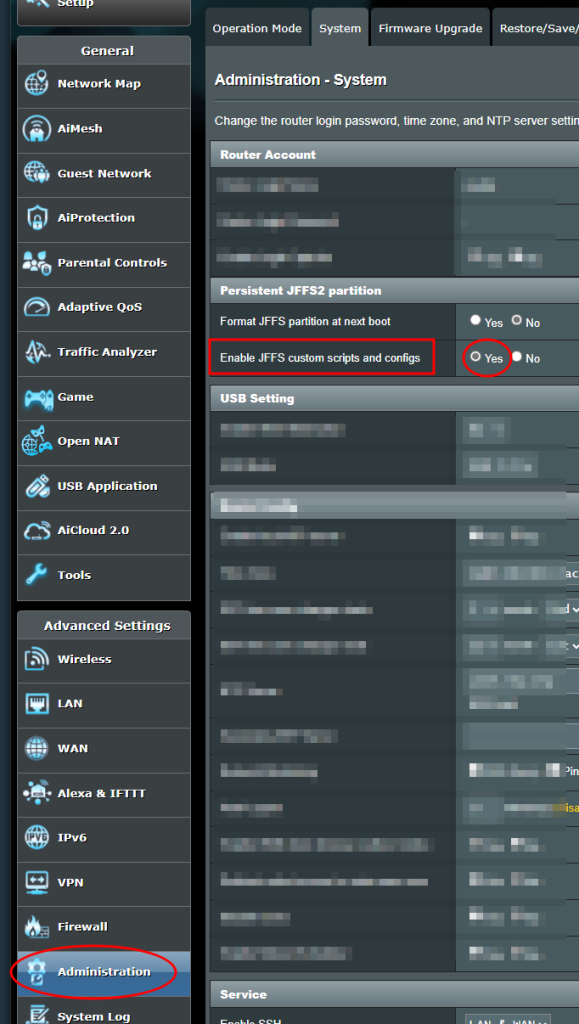
You need to start by enabling JFFS (if not already done so) so you can put in your own startup scripts and saved config file.
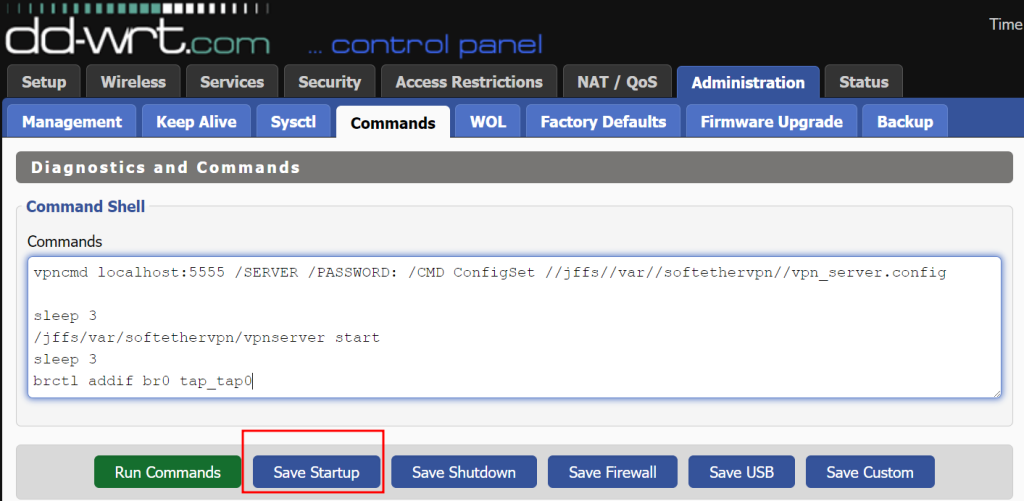
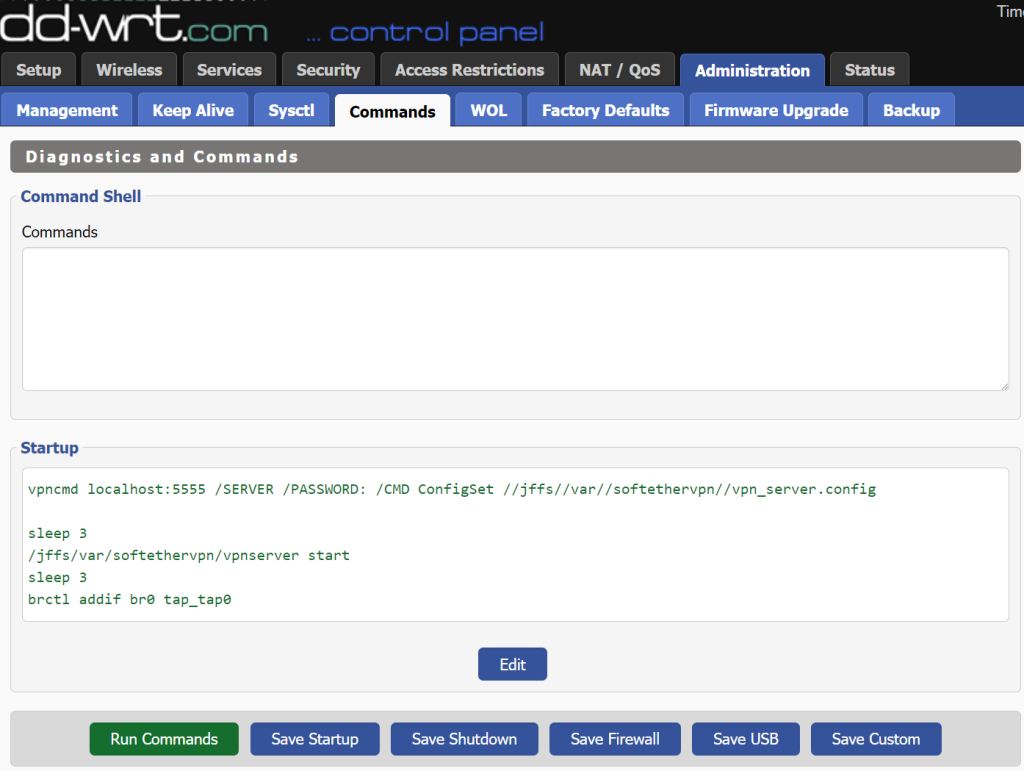
Step 1: Load the config file into the running server’s memory on start
The key idea came from this forum post DD-WRT :: View topic – SoftEther Working after reboots *Special Way with JFFS2*. There’s a programatically way to load a config file at any point:
vpncmd localhost:5555 /SERVER /PASSWORD: /CMD ConfigSet //jffs//var//softethervpn//vpn_server.config
vpncmd is a prompt based command line user interface like diskpart, but there’s a shortcut to log into the server and execute a command like ConfigSet in one line instead of starting vpncmd first then type the syntax, which is the /CMD switch:
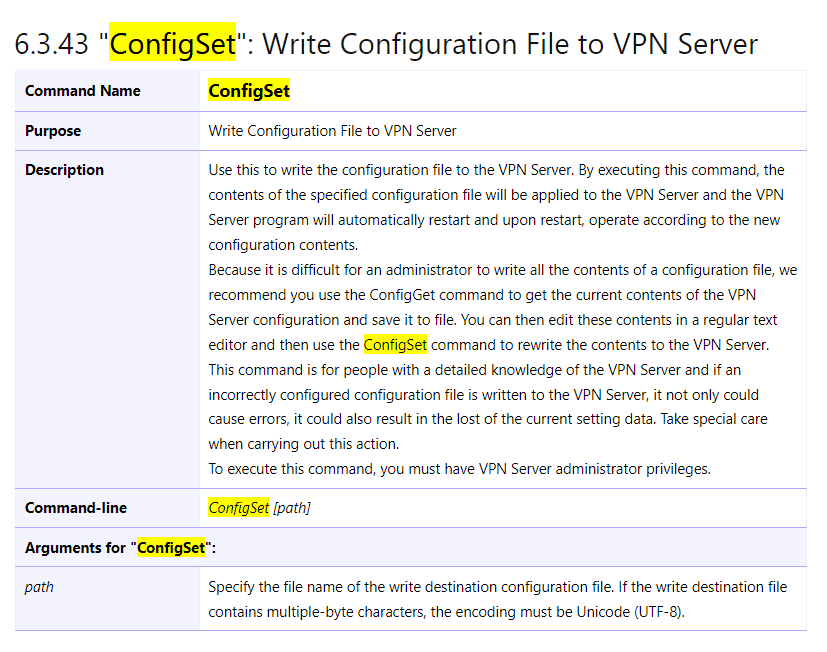
Note that the program uses ‘//’ for the path names to prevent the ‘/’ symbol from being misinterpreted as a command switch.
Technically you can load any config file anywhere, but if you want to read the config file SoftEther VPN server flushes out (the most updated state after your changes through the Remote Admin interface), stick with loading the default path. This is likely what most people wanted (closes to live edit).
/SERVER merely means the remote admin interface is going to administer a SoftEther VPN Server/Bridge, not Client, or VPN tools mode. Yes, you can puppeteer the Client setup managing connections from elsewhere with the all-in-one vpncmd tool, so the distinction is necessary.
/PASSWORD: should be left empty as the SoftEther VPN server ALWAYS start in a blank state (with a blank password) until you explicitly tells the server program to load a config file into its memory. The server starts blank is the reason we had to go through this drivel in the first place. If you had a set password, you already had a config file loaded.
Step 2: Enabling the server after the configuration file is loaded
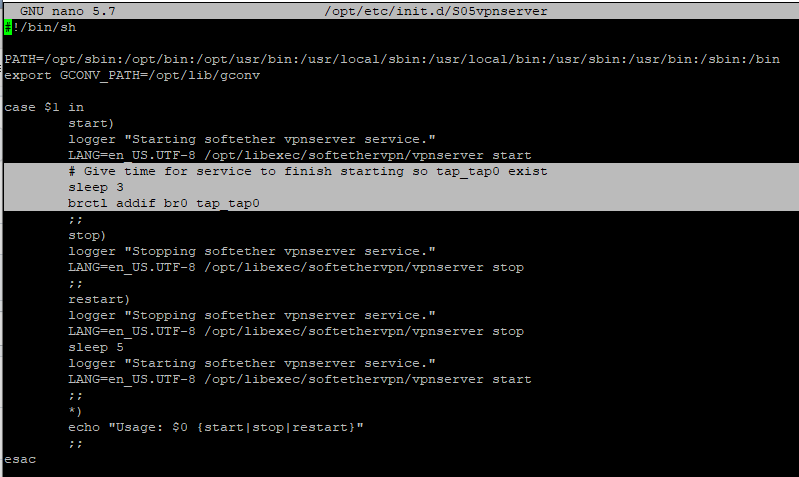
I typically give it around 3 seconds for the changes to reflect after loading the config file before doing anything else with it. Wait 3 seconds then start the server
sleep 3 /jffs/var/softethervpn/vpnserver start
The server must be started BEFORE briding TAP interface in the next step because Softether programmed it robustly: the TAP inteface has the same lifetime as when the Softether server is active. It doesn’t exist if the Softether service (vpnserver) didn’t start, and the TAP interface is gone after the service stops.
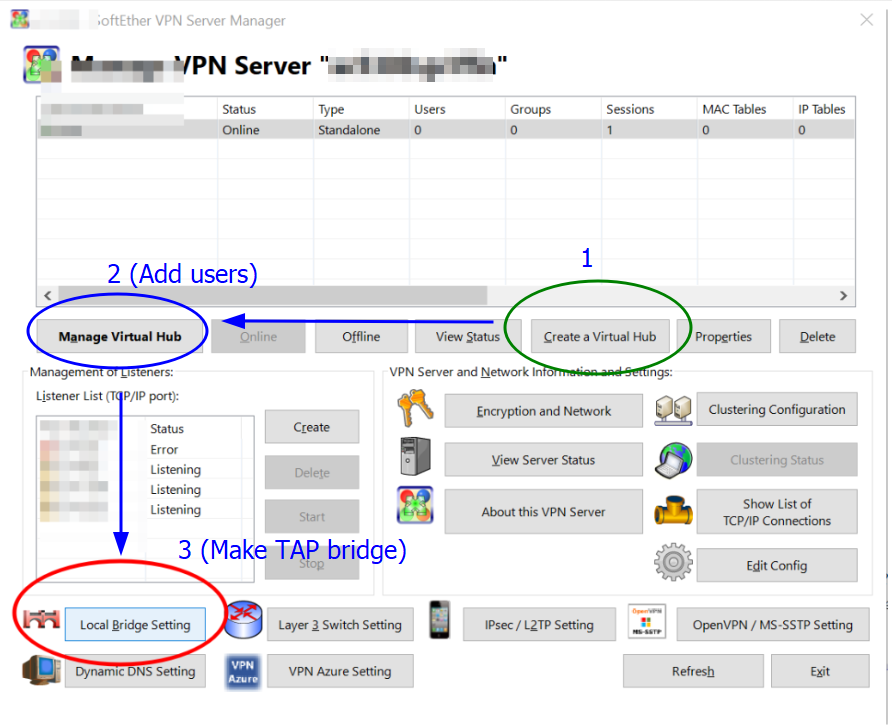
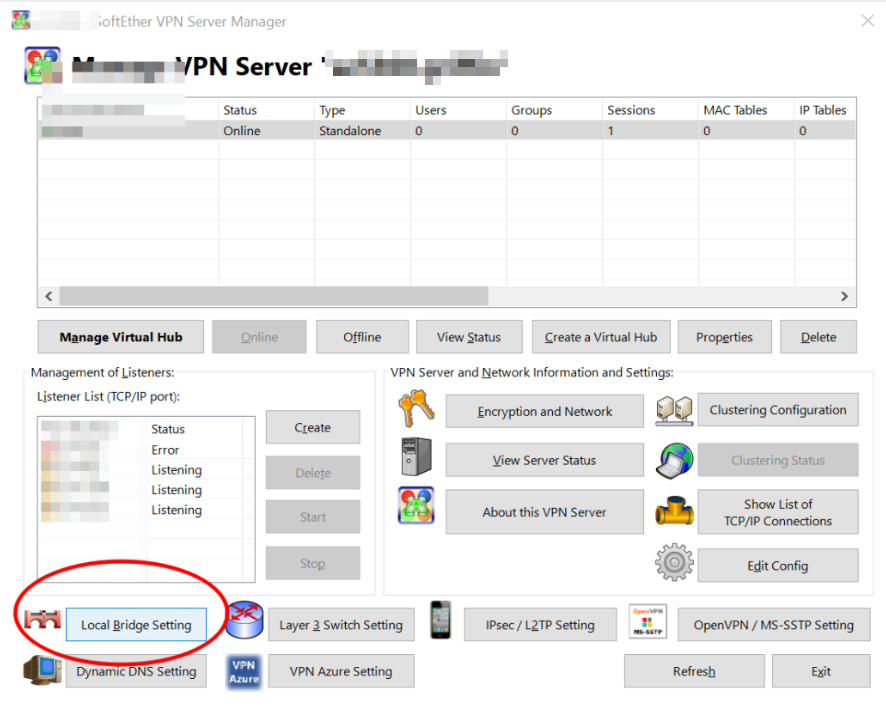
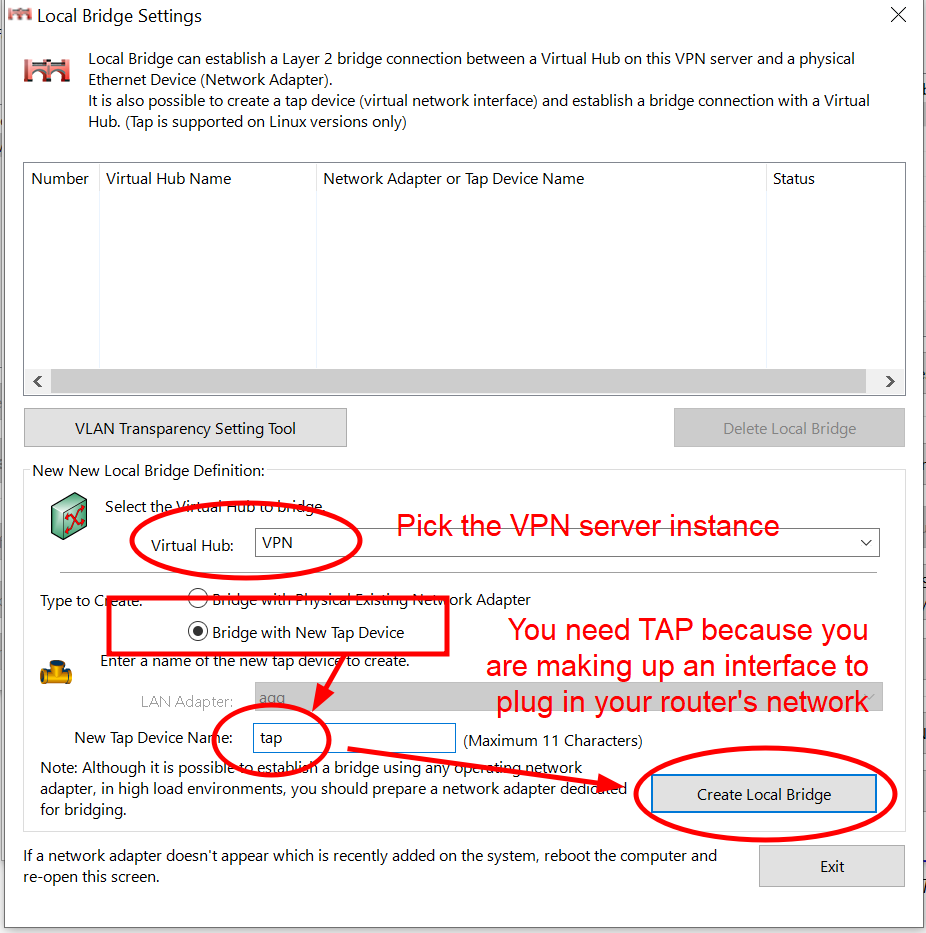
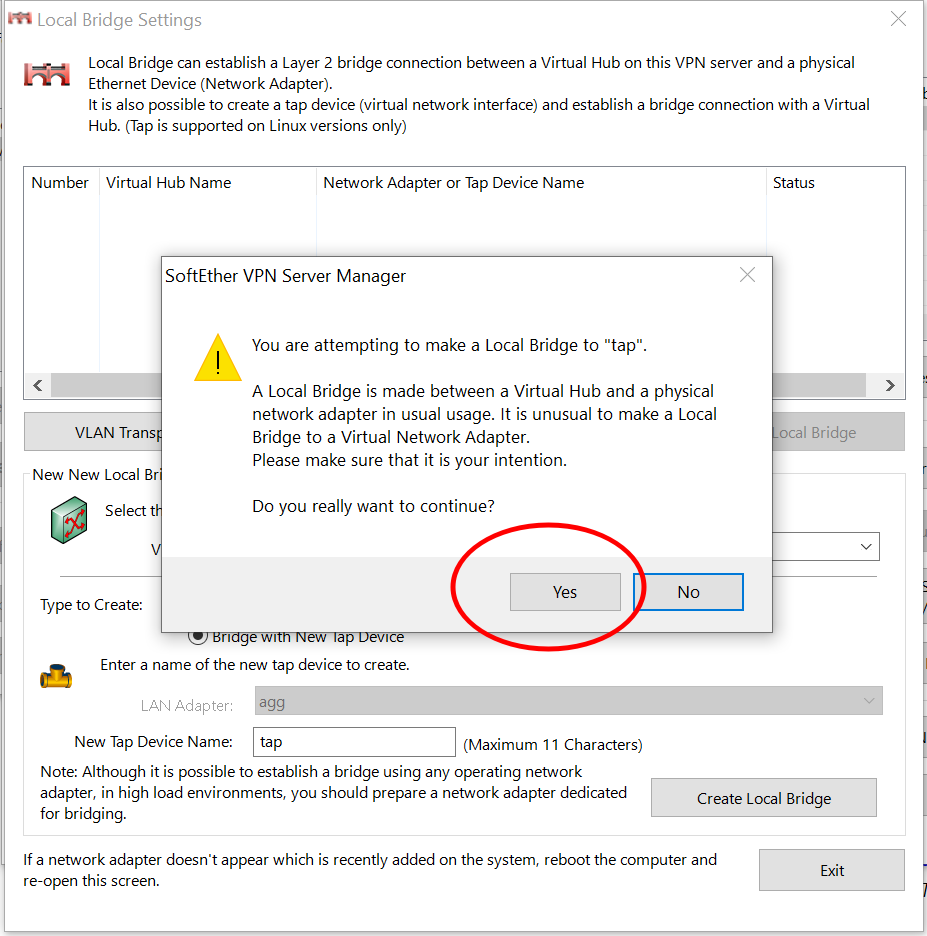
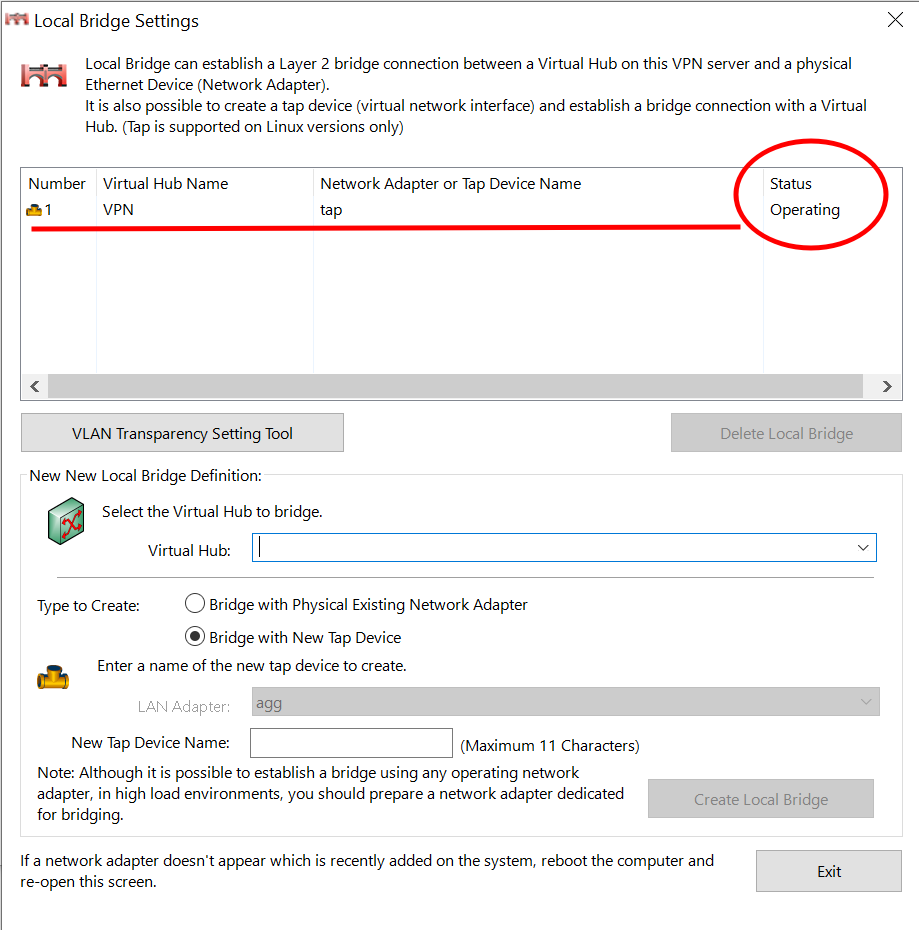
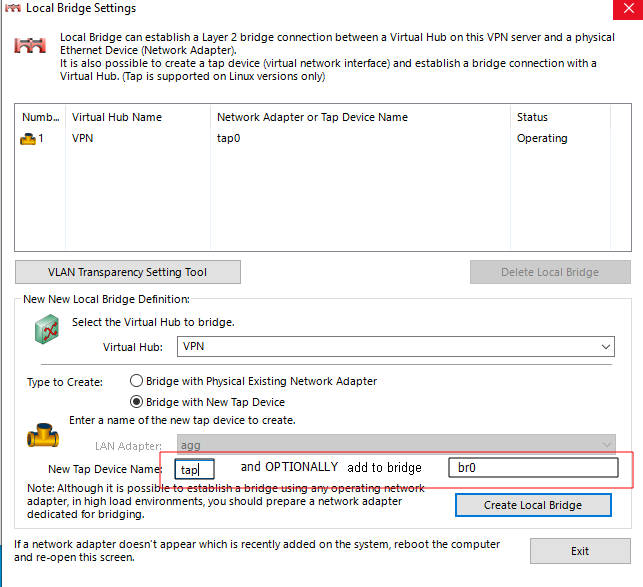
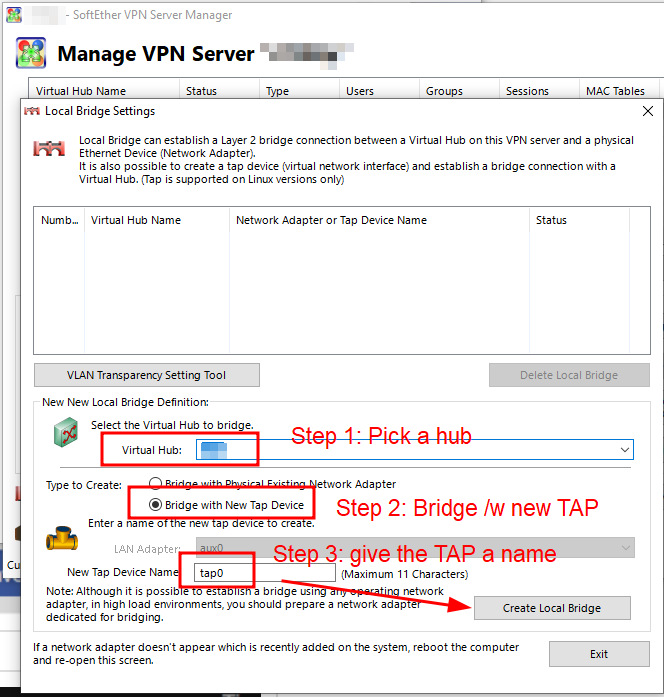
Step 3: Add the TAP adapter to the LAN Bridge
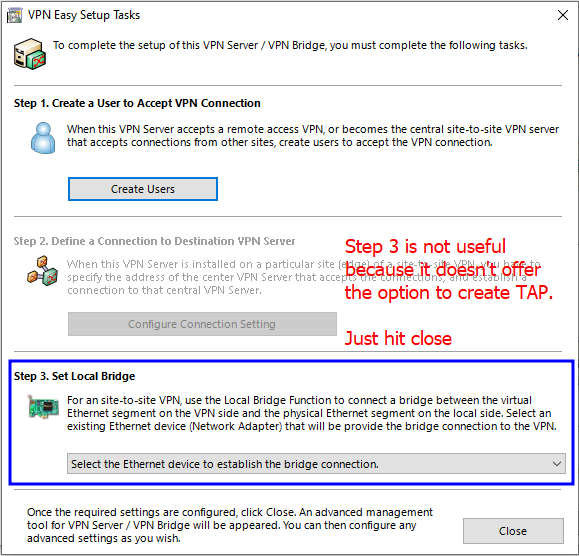
This part is described in my other article for a different router firmware platform (Merlin WRT), but the same idea translates here: you need a TAP adapter to put SoftEther VPN Server on a Router, despite SoftEther UI has the option to create the TAP adapter, it doesn’t have the feature to add that newly created TAP adapter to the LAN bridge and therefore renders the feature useless out of the box the way it came with DD-WRT!
The good part about DD-WRT is that the tun kernel module is already loaded so SoftEther VPN server can freely make the TAP adapter (for Merlin you need to modprobe tun first).
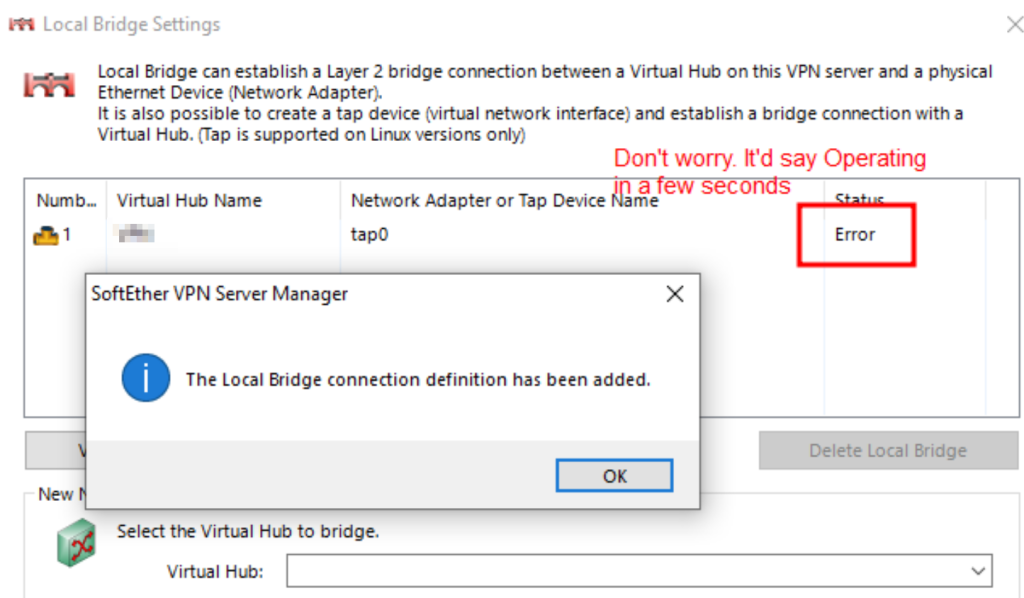
Since the TAP adapter only appears when SoftEther’s VPN is running WITH with config file that defines the TAP adapter, you have to make sure give enough time for the TAP adapter to finish building before attempting to bridge it or it’d fail!
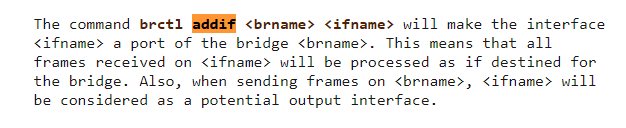
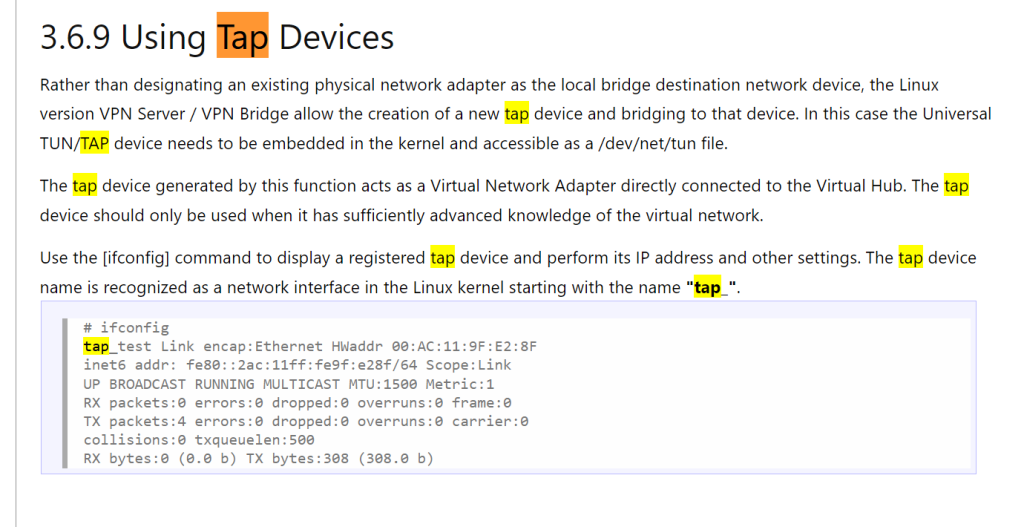
If you call your TAP adapter tap0 in SoftEther’s config, it’s called tap_tap0 in Linux when it exist. Most often the LAN bridge is called br0, so if you have these common default names, the command to add the TAP interface to the LAN bridge is
sleep 3
brctl addif br0 tap_tap0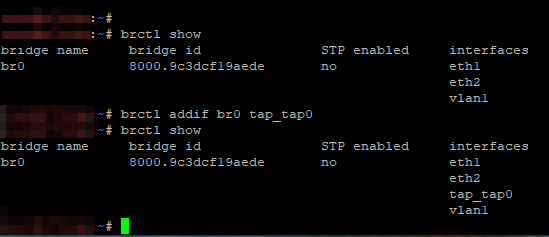
Of course replace the names accordingly. You can check the names by ifconfig or ip link show, or use whichever tool you know that lists all network device and adapters.
Summary
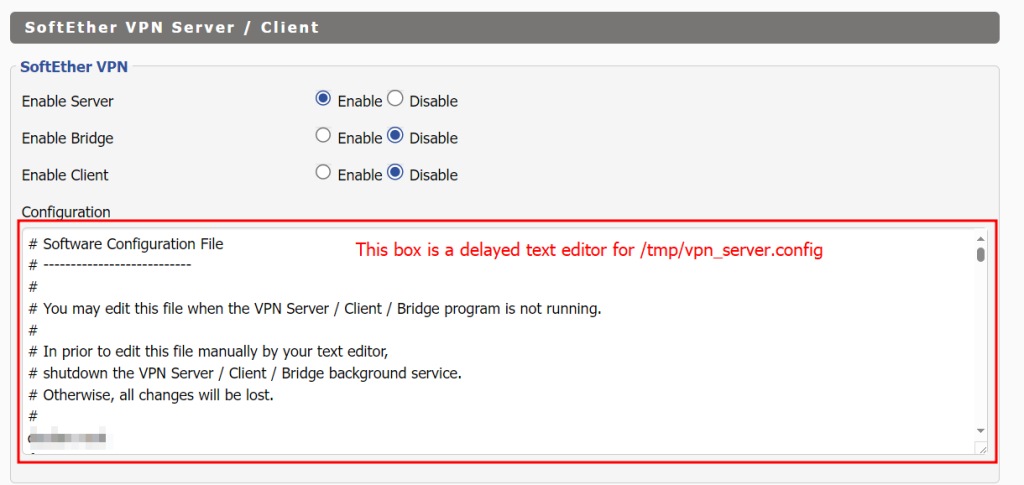
SIDE panel: DD-WRT’s text entry box for config string (useless)
The text box in DD-WRT’s UI for SoftEther VPN is hardwired to /tmp/vpn_server.config (EDIT: it’s broken now as of 2024-05-11. The text box now loads and writes directly onto the nvram variable called sether_config, which doesn’t even interpret a file path anymore.), which is freaking used by nowhere unless the user points to it. WTF?! This is very unpolished and wastes people a lot more time than it saves. At least drop people a hint with a text note saying this is not done yet and the rail connects to nowhere!
As said above, we should disable the entire “SoftEther VPN Server/Client” section in the WebUI anyway so you won’t even get to use this worthless ‘Configuration’ textbox. I’ve wasted so much time on this nonsense and wished this WebUI section didn’t exist in the first place. It’s just irresponsible to leave something this broken out there that ended up being a deadly trap/time-sink.
![]()