Netgear R7000 supports these major forms of firmware
DD-WRT (Powerful, but very messy web interface that are sometimes non-intuitively organized)
FreshTomato (Powerful. I wouldn’t say easy to use but mortal souls can understand it)
XWRT-Vortex (Easy to use AsusWRT Merlin web interface adapted for non-Asus routers)
There are other forms of Tomato that support R7000 but only FreshTomato is actively maintained as of late 2021.
However updating it from stock firmware to FreshTomato has some model-specific quirks (that you cannot extrapolate from general procedures for other models)
First of all. You cannot update directly to the latest firmware. There’s a bootstrap (intermediate) firmware called INITIAL (usually downloaded from ‘Netgear R-series initial files’ folder) that must be installed (upgraded from stock firmware to) FIRST so the router is ready to accept the latest/full firmware.
Here’s the model specific quirk: the default login/password is non-standard for R7000! It’s not root/admin (unless you press the button to reset the NVRAM)! It’s admin/@newdig!
After logging into the bootstrap/INITIAL freshtomato with the password above, upgrade the firmware to the latest (the one intended) and choose clear NVRAM along the way. The default login/password will be root/admin as standard for freshtomato.
There’s another twist for SSH connections! The username in your web admin interface do NOT matter! The username is ‘root’ for SSH regardless of what you set in the web interface, your password is the one entered in web admin interface! This is super counterintuitive!
The first thing to worry about after a fresh install is getting the Apps you need. I’d recommend installing all these app stores to start with:
F-droid (Only free and open source, privacy-respecting and community verified apps. Some paid apps on Google Play such as DavX and FairMail is free on F-droid to promote it! Note that sometimes the F-droid repository might be a little behind)
Aptoide (App writers self-publishes app under community scrutiny, which sometimes let you download geoblocked app. Fairly updated but not as updated as Auora. The apps are not tightly guarded as F-droid)
Auora (It’s a proxy to downloading the APK from Google Play store without letting Google track you. It’s anonymous account is international, which makes the search for the basic apps very difficult as it’s seeing a worldwide scope. You can have Auora sign in with a disposable Google account for apps that are relevant to your regions. Remember to disable your Google Play if installed and have Google Play links open with Auora.)
Yalp store is outdated and not actively maintained. Google Play store proxies needs to constantly fight with Google’s changes so they need to be updated frequently. Just stick with Auora for now.
This is the very first app you need to install after you get F-droid or Auora. This app is a must even if your phone is not DeGoogled. A lot of apps asks for more permissions than they actually needed, but sometimes we are stuck with using them (like required at work).
The solution is to create a sandbox (another copy/instance of the app) that has a different space for app data and they cannot see your actual call logs, contact list, photos, etc even if you gave them the permission to do so. It’s called an ‘Island’ and the native space is called ‘Mainland’.
Putting an app in Island (work mode) doesn’t protect you from other access requests such as location, etc. Nonetheless the mainland and island app has their own data space (i.e. you have to configure it twice as if the apps are freshly installed) so they can have two sets of settings and application permissions.
Apps installed through the Island instance of the App Stores / Browsers above will stay in Island mode. Apps installed through Mainland instance of the App Stores will stay in Mainland mode. They are totally separate as intended. You can clone the APK/app between Island and Mainland through the Island App.
Note that some VPN clients will have a split personality (which is a good thing) between Mainland and Island! This means you get to have a group of apps that’s on VPN and a group of apps that’s on the direct network without managing them one by one with split tunneling!
Also note that the Island won’t be able to access external storage like SD cards. It’s by design so that Island apps are trapped in their own virtual space so they cannot snoop around your personal data even if you gave them the permissions (demanded during installation)
Browsers: Brave + DuckDuckGo
DuckDuckGo (sometimes the permissions and default app lunching do not work correctly with it. I use DuckDuckGo first whenever it doesn’t break)
Brave (based on Chromium). Replaces Chrome. It has a chain sync feature that syncs passwords, bookmarks, etc like Google Chrome does but WITHOUT AN ACCOUNT. As long as you have one device with Brave connected to the Internet and you did the steps to match the devices, they will sync up.
Keyboard: MS Swift Keyboard
I speak 5 languages and found Microsoft Swift on screen keyboard having nice IME (Input Method Engine) for all of them and also have an intuitive interface that’s not clumsy to use. I prefer it over Gboard and AOSP that came with LineageOS). I do not log in to Microsoft Swift and share data with them (the petty convenience of sharing the clipboard is just not worth it).
NON-CLOUD based Email client: Fairmail / MailDroid
Email is a huge topic which I’ll discuss in a separate post as it often come as a bundle with contact list, task lists, calendars, and taking notes.
Do NOT use free apps that sends your credentials to the provider‘s BACK-END SERVERS which you don’t own and manage, such as BlueMail if you are doing all these to protect your privacy (you might as well use Google if you do that)! NextCloud is OK as long as you host it.
K-9 mail client is promising but I do not like it implicitly forcing you to log in through Google’s web interface to set it up instead of doing the traditional IMAP setup if you use Gmail.
Fairmail has a lot of extra steps during setup because it let you customize the heck out of it and by default (out of the box), it protects you from tracking images and malicious HTML dingleberries out of the box (which hurts readability).
MailDroid is is supported by in-app advertisements (you can remove ads with Pro version). It’s more intuitive than Fairmail and K-9. It automatically detects Gmail’s IMAP settings (not Google OAuth2 login) correctly, but doesn’t autodetect does not work with namecheap’s cPanel mail while Fairmail does.
There’s an unintuitive design choice by MailDroid that by default Sent email are saved on the device (local folder), not the IMAP ‘Sent’ folder. The fix is also awkward, but it’s doable and you only have to do it once for every account added to Maildroild.
I don’t use Aqua Mail because the free version do not allow multiple accounts like MailDroid does.
K-@ Mail feels like Gmail. Support multiple accounts. Also autodetect Gmail IMAP correctly but not cPanel email correctly like Maildroid. IMAP Folders do not work correctly for either Gmail/cPanel (it shows nothing): the folder button (bottom left) shows generic Inbox/Draft/Outbox/Sent/Trash/{Folder list} which do not match the IMAP folders. “Folder list” shows the IMAP folders, but when I clicked on them it shows nothing.
Just because of the non-working IMAP folders, I chose to not use K-@ Mail and stick with MailDroid.
I personally like Fairmail because the interface wastes no visual space showing all my IMAP folders. MailDroid is visually pleasing but the folder panel took up too much white space and I cannot tuck away the special (local) folders in the side panel.
Chat: Signal, VoIP: Telegram
Fascist book now requires data sharing with Whatsapp, so people in Hong Kong who don’t trust the fascist Chinese Communist Party regime is dropping it like a hot potato.
Signal App do not keep a master key on your message (if you lose the key, you lock yourself out and there’s no recovery) and is my preferred app for chat. Although Telegram’s owner has a good track record of protecting political dissidents (that’s why it was used in 2019 Hong Kong Protests), it’s not fully open source and the owner still has the master key. Telegram is still way better than Whatsapp but for full privacy I stick with Signal App.
Signal App’s voice over IP is a little weak and it can break up easily on spotty network connection. Telegram is much better in terms of voice quality so I basically use Telegram as a VoIP phone and leave the chats to Signal.
The new idea of privacy is not hiding what you normally do (legal) perfectly, but to make it difficult for automation to uniquely identify and match you so your habit doesn’t get observed and stereotyped. For example, I love fried chicken and watermelon, but I don’t want to see advertisements for malt liquor.
Apple’s ecosystem is tightly controlled, so the uniqueness is guaranteed. If you use Apple products, you are totally at the mercy of Apple Inc AND their employees (whom you didn’t hire) honoring their legal, contractual and moral obligations. It’s by design: Apple limits what you can do within their imaginations so they can limit the scope of what kinds of thing that can possibly go wrong. The side effect is customers are giving away their freedoms to authoritarians for convenience and promised protections.
Therefore my exploration of escaping the Goolag Applelago do not consider Apple products. They can turn into Chinese Communist Party dictatorship at a flip of a switch when they’ve became so powerful that they are above law. Given how they bankroll the lobbyists and how close they are to ChiCom/CCP, it’s a more realistic threat than most think.
Operating system: AOSP
I don’t have a Pixel so I cannot try CalyxOS and GrapheneOS. For usability, it’s most practical to have Android-Open Source Projects builds that does not contain proprietary Google apps. Many proprietary Google services are built in stock ROM, so these AOSP builds either remove them or replace them with MicroG (which do not track users) so apps that depends on the proprietary Google Play Services will still run.
So far I’ve tried these OS that supports a wide range of old phones:
I’m least impressed by the performance of /e/. It’s very laggy compared to the rest to the extent it’s close to the Stock ROM. The concept is good that it tries to have a tightly integrated user experience (including Cloud) to replace Google’s ecosystem, but the apps that came out of the box is primitive. “Apps” is a nice package installer that gives a bit more access to common apps that’s a little less than Auora OSS (but easier to find) and a lot more than F-droid. That’s the only good thing I can say about it for now.
NanoDroid came with a lot of well-designed, excellent privacy-respecting open source apps that is eye opening (I’ll discuss it in later posts). They have a few more apps pre-installed than what I wanted, so I went with LineageOS + microG so I can pick-and-choose my apps.
The official LineageOS comes without these Google’s proprietary infrastructure, so either you install proprietary Gapps through TWRP (one of the universal bootloaders to install LineageOS and the like), which defeats DeGoogling, or painfully install microG on top of it. I decided to go with the latter.
The phone works A LOT FASTER (fluid user experience) with LineageOS than the bloated crap that came with Stock ROM.
WARNING: Things to watch out while mucking with Android OS upgrades/changes
Absolutely back up your files (apps, photos, videos, downloads, settings, etc) to external drive or cloud storage first! Do NOT trust any of the doc that your OS might work after an ‘upgrade’. It doesn’t. The AOSP builders did not spend much time thinking of migration issues (these are boring thankless menial work that nobody wants to do it for free, so don’t get your hopes up).
You MUST ALWAYS assume that you’ll have to factory reset your device, which I recently learned the hard way by losing data because I formatted the SD card as internal storage (called adoptable storage) in LineageOS 15.1 then unwittingly deleted the encryption key to the SD card while factory resetting the device because the /data and /system partitions are not in a compatible state with the new 18.1 (or even 16.0)!
Some maintainers are not very fond of adoptable storage so they don’t put much thought into it hoping it’ll go away. Adoptable storage a useful feature but it’s full of traps (fragile) so it’s best to avoid it altogether unless you swear to not upgrade your LineageOS and assume the SD card will live and die with the device.
For GUI development, we often start with controls (or widgets) that user interact with and it’ll emit/run the callback function we registered for the event when the event happens.
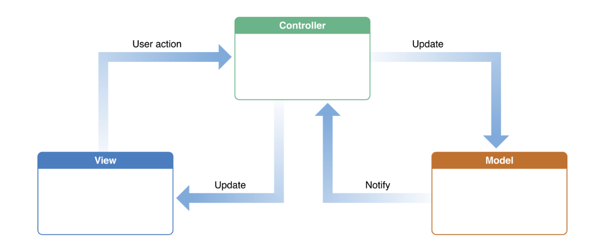
Most of the time we just want to read the state/properties of certain controls, process them, and update other controls to show the result. Model-View-Controller (MVC) puts strict boundaries between interaction, data processing and display.
The most common schematic for MVC is a circle showing the cycle of Controller->Model->View, but in practice, it’s the controller that’s the brains. The view can simultaneously accept user interactions, such as a editable text box or a list. The model usually don’t directly update the view directly on its own like the idealized diagram.
From https://www.educative.io/blog/mvc-tutorial
With MVC, basically we are concentrating the control’s callbacks to the controller object instead of just letting each control’s callback interact with the data store (model) and view in an unstructured way.
When learning Flutter, I was exposed to the Redux pattern (which came from React). Because the tutorials was designed around the language features of Dart, the documentation kind of obscured the essence of the idea (why do we want to do this) as it dwelt on the framework (structure can be refactored into a package). The docs talked a lot about boundaries but wasn’t clearly why they have to be meticulously observed, which I’ll get to later.
The core inspiration in Redux/BLoC is taking advantage of the concept of ‘listening to a data object for changes’ (instead of UI controls/widget events)!
Instead of having the UI control’s callback directly change other UI control’s state (e.g. for display), we design a state vector/dictionary/struct/class that holds contents (state variables) that we care. It doesn’t have to map 1-1 to input events or 1-1 to output display controls.
When an user interaction (input) event emitted a callback, the control’s callback do whatever it needs to produce the value(s) for the relevant state variable(s) and change the state vector. The changed state vector will trigger the listener that scans for what needs to be updated to reflect the new state and change the states of the appropriate view UI controls.
This way the input UI controls’ callbacks do not have to micromanage what output UI controls to update, so it can focus on the business logic that generates the content pool that will be picked up by the view UI controls to display the results. In Redux, you are free to design your state variables to match more closely to the input data from UI controls or output/view controls’ state. I personally prefer a state vector design that is closer to the output view than input controls.
The intuition above is not the complete/exact Redux, especially with Dart/Flutter/React. We also have to to keep the state in ONE place and make the order of state changes (thus behavior) predictable!
Actions and reducers are separate. Every input control fires a event (action signal) and we’ll wait until the reducers (registered to the actions) to pick it up during dispatch() instead of jumping on it. This way there’s only ONE place that can change states. Leave all the side effects in the control callback where you generate the action. No side effects (like changing other controls) allowed in reducers!
Reducers do not update the state in place (it’s read only). Always generate a new state vector to replace the old one (for performance, we’ll replace the state vector if we verified the contents actually changed). This will make timing predictable (you are stepping through state changes one by one)
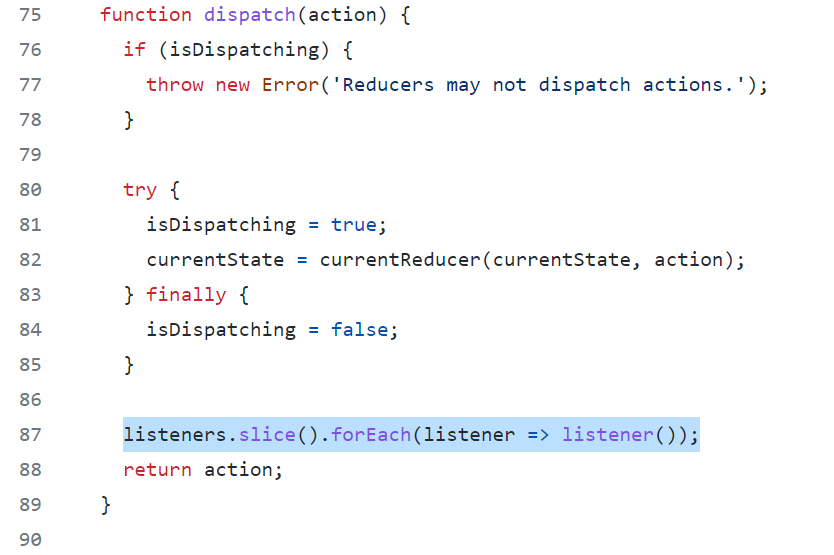
In Javascript, there isn’t really a listener actively listening state variable changes. Dispatch (which will be called every time the user interacts using control) just runs through all the listeners registered at the very end after it has dispatched all the reducers. In MATLAB, you can optionally set the state vector to be Observable and attach the change listener callback instead of explicitly calling it within dispatch.
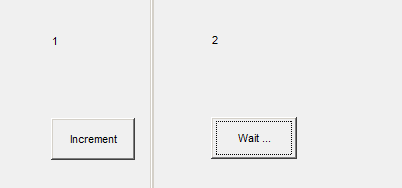
Here is an example of a MATLAB class that captures the spirit of Redux. I added a 2 second delay to emulate long operations and used enableDisableFig() to avoid dealing with queuing user interactions while it’s going through a long operation.
classdef ReduxStoreDemo < handle
% Should be made private later
properties (SetAccess = private, SetObservable)
state % {count}
end
methods (Static)
% Made static so reducer cannot call dispatch and indirectly do
% side effect or create loops
function state = reducer(state, action)
% Can use str2fun(action) here or use a function map
switch action
case 'increment'
fprintf('Wait 2 secs before incrementing\n');
pause(2)
state.count = state.count + 1;
fprintf('Incremented\n');
end
end
end
% We keep all the side-effect generating operations (such as
% temporarily changing states in the GUI) in dispatch() so
% there's only ONE PLACE where state can change
methods
function dispatch(obj, action, src, evt)
% Disable all figures during an interaction
figures = findobj(groot, 'type', 'figure');
old_fig_states = arrayfun(@(f) enableDisableFig(f, 'off'), figures);
src.String = 'Wait ...';
new_state = ReduxStoreDemo.reducer(obj.state, action);
% Don't waste cycles updating nops
if( ~isequal(new_state, obj.state) )
% MATLAB already have listeners attached.
% So no need to scan listeners like React Redux
obj.state = new_state;
end
% Re-enable figure obj.controls after it's done
arrayfun(@(f, os) enableDisableFig(f, os), figures, old_fig_states);
src.String = 'Increment';
end
end
methods
function obj = ReduxStoreDemo()
figure();
obj.state.count = 0;
h_1x = uicontrol('style', 'text', 'String', '1x Box', ...
'Units', 'Normalized', ...
'Position', [0.1 0.3, 0.2, 0.1], ...
'HorizontalAlignment', 'left');
addlistener(obj, 'state', ...
'PostSet', @(varargin) obj.update_count_1x( h_1x , varargin{:}));
uicontrol('style', 'pushbutton', 'String', 'Increment', ...
'Units', 'Normalized', ...
'Position', [0.1 0.1, 0.15, 0.1], ...
'Callback', @(varargin) obj.dispatch('increment', varargin{:}));
% Force trigger the listeners to reflect the initial state
obj.state = obj.state;
end
end
%% These are 'renders' registered when the uiobj.controls are created
% Should stick to reading off the state. Do not call dispatch here
% (just leave it for the next action to pick up the consequentials)
methods
% The (src, event) is useless for listeners because it's not the
% uicontrol handle but the state property's metainfo (access modifiers, etc)
function update_count_1x(obj, hObj, varargin)
hObj.String = num2str(obj.state.count);
end
end
end
I was a little embarrassed that I’ve never came across Euclid’s GCD algorithm until years after I graduated with Math and Engineering degrees. The descriptions I’ve found online (especially Wikipedia) are convoluted and confusing, and the mechanical description of the algorithm does not shine light to any intuition. Then there comes proofs and abstract algebra properties that even after I followed the reasoning, I’d soon forget after I stop looking at it in a few weeks.
Just by staring at one simple description of the algorithm:
The classic algorithm for computing the GCD, known as Euclid’s algorithm, goes as follows: Let and be variables containing the two numbers, divide by . Save the divisor in , and save the remainder in . If is , then stop: contains the GCD. Otherwise repeat the process, starting with division of by .
K.N. King’s C++ Programming (Chapter 6 Exercise 2)
I reversed engineered one line of reasoning how one could come up with the Euclid GCD on his own. Turns out there is one twist/angle that most traditional explanations glossed over: quotients do NOT matter and WHY it does NOT matter!
It goes back to what GCD stands for: greatest common divisor. You are looking for the largest factor that simultaneously divides and evenly. If you rethink in terms of multiplication, you are finding the biggest tile size that can simultaneously cover and without gaps:
Find s.t. and where are integers.
Imagine you are a lazy and cheap contractor who have unlimited tile samples of all sizes to try before making a large order:
[Goal] you have to cover with two floors with potentially different sizes and gaplessly
[Constraint: divisible] your customer won’t let you cut (fractional) tiles because it’s ugly
[Constraint: common denominator] you can only order ONE tile size to take advantage of bulk discounts
[Objective: greatest] more tiles means more work to lay it, so you want to shop for the biggest tile size that does the job.
For simplicity of the argument, we also assume the divisor is the smaller number. If is the bigger number, the roles will reverse in the next round because the remainder from dividing by a larger number is the dividend itself, which becomes the divisor in the next round while the old divisor (the larger number) becomes the dividend.
For relatively prime pairs, the algorithm will eventually stop with a GCD of because divides all integers.
Here’s the analog of Euclid algorithm:
start out with 1 big tile covering the entire smaller floor
see if we can cover without gaps using big tiles of size
if yes, we are done. , the macro-tile is your GCD (perfect-sized tile).
if there are gaps (non-zero remainder), pick a tile-size that covers the ugly gap (the remainder becomes the divisor), then repeat the same process above over the last tile size (the divisor becomes the dividend) until there are no gaps (remainder become zero).
The algorithm is taking advantage of the fact the remainder is smaller than the last tile size (divisor) so we can rewrite the last tile size in multiples of the remainder (old gap) plus the new gap. By the time the new gap evenly divides the last tile (the big tile right before it), all numbers before that can be written as multiples of the new gap (i.e. the last gap evenly divides all the numbers in the chain all the way up to and ).
Let’s start with a simple case GCD that terminates early:
We focus on the last tile and write it in terms of the old remainder :
Since the new remainder is , the old remainder divides the last tile . Since we are dividing in terms of the remainder , we have
The algorithms stops at which means we successfully divided the last tile with (logistically stored in ) with no gaps left. (or is therefore the greatest common factor (divisor) that are shared by all the numbers involved all the way up to and .
This is the beauty of Euclid’s GCD algorithm: once the gap (remainder) is sliced small enough to evenly divide the tile (divisor) right before it, every term before it be can written in terms of integer multiples of the last number that divides the last tile without gap (no more remainder).
In our example, can be written as a multiple of , aka because integer multiples of numbers that are already integer multiples of can be written in terms of a larger integer multiple of . This is why quotients do not matter in the Euclid GCD algorithm:
The spirit of the algorithm is that every time we see a gap, we fill it with a small tile that’s exactly the gap size, and attempt to replace the last tile by covering it in terms of the new smaller tile (that was used to fill the gap). We are recursively slicing the last tile with the gaps produced until there are no gaps left. Once you find the GCD tile, you can replace all the bigger tiles before in terms of it with no gaps.
There’s an interesting perspective of using the Euclid GCD algorithm to solve Diophantine Equations (integer written as a linear combination of integers with integer coefficients): turns if in is the same as writing . We can flip the sign of by saying substituting .
In summary,
Euclid GCD’s algorithm is sub-dividing the last (or any one) large tile (last divisor) with the gap (last remainder) until there are no gaps left. Then any bigger tiles up the chain can be expressed as an integer multiple of the last piece (the smallest piece searched so far) that fills the last gap.
The first large tile is of course the smaller of the two numbers involved in the gcd calculation. The larger of the two number is the floor to be covered.
The other observation is that when you see the remainder being 1, you already know the two numbers are relatively prime. The last step to get the remainder to 0 is redundant (because it’s a guaranteed last step).
The other observation is that subdividing the last big tile (divisor) with the last gap (remainder) till it’s evenly divided chains up, because everything is an integer multiple of the smallest piece that evenly divides the gap (remainder) and the last big tile (divisor), therefore the algorithm is recursive.
But this kind of recursion is not mandatory. It’s a tail recursion* that can be unrolled into iterations (looping), either by the compiler or the programmer, which is what we initially did.

 and
and  be variables containing the two numbers, divide
be variables containing the two numbers, divide  , then stop:
, then stop:  stands for: greatest common divisor. You are looking for the largest factor that simultaneously divides
stands for: greatest common divisor. You are looking for the largest factor that simultaneously divides  and
and  evenly. If you rethink in terms of multiplication, you are finding the biggest tile size
evenly. If you rethink in terms of multiplication, you are finding the biggest tile size  that can simultaneously cover
that can simultaneously cover  and
and  where
where  are integers.
are integers. because
because  that terminates early:
that terminates early:![50 (dividend) = [15+15+15 (divisor)] + 5 (remainder)](https://wonghoi.humgar.com/blog/wp-content/ql-cache/quicklatex.com-e1912abceca1670919e9aa937af0124e_l3.png "Rendered by QuickLaTeX.com")
 and write it in terms of the old remainder
and write it in terms of the old remainder  :
:
 right before the algorithm stops.
right before the algorithm stops. takes a few more steps:
takes a few more steps:  which means we successfully divided the last tile
which means we successfully divided the last tile  with
with  (logistically stored in
(logistically stored in  ) with no gaps left.
) with no gaps left.  can be written as a multiple of
can be written as a multiple of  , aka
, aka  in
in  is the same as writing
is the same as writing  . We can flip the sign of
. We can flip the sign of  by saying substituting
by saying substituting  .
.